base class for both map and set – should not be used directly More...
#include <orbtree_base.h>

Public Types | |
| typedef NodeAllocator::NVType | NVType |
| Type the function NVFunc returns. | |
Public Member Functions | |
| void | clear () |
| erase all nodes | |
| template<class K > | |
| void | get_sum_fv (const K &k, NVType *res) const |
| get the generalized rank for a key, i.e. the sum of NVFunc for all nodes with node.key < k | |
| void | get_sum_fv_node (NodeHandle x, NVType *res) const |
| get the generalized rank for a given node, i.e. the sum of NVFunv for all nodes before it in order | |
| void | get_norm_fv (NVType *res) const |
| get the normalization factor, i.e. the sum of all keys | |
| void | check_tree (double epsilon=-1.0) const |
| check that the tree is valid More... | |
| template<class... T> | |
| auto | emplace (T &&... t) -> std::pair< NodeHandle, bool > |
| template<class... T> | |
| auto | emplace_hint (NodeHandle hint, T &&... t) -> NodeHandle |
Protected Types | |
| typedef NodeAllocator::Node | Node |
| node objects | |
| typedef NodeAllocator::KeyValue | KeyValue |
| typedef NodeAllocator::KeyValue::KeyType | KeyType |
| typedef NodeAllocator::KeyValue::ValueType | ValueType |
| typedef NodeAllocator::NodeHandle | NodeHandle |
| handle to refer nodes to (pointer or integer) | |
Protected Member Functions | |
| void | NVAdd (NVType *x, const NVType *y) const |
| function to add NVType values; checks for overflow and throws exception in the case of integral types | |
| void | NVSubtract (NVType *x, const NVType *y) const |
| function to subtract NVType values; checks for overflow and throws exception in the case of integral types | |
| void | create_sentinels () |
| Node & | get_node (NodeHandle n) |
| convenience function that returns node object for a node handle | |
| const Node & | get_node (NodeHandle n) const |
| convenience function that returns node object for a node handle | |
| NodeHandle | root () const |
| handle of root sentinel | |
| NodeHandle | nil () const |
| handle of nil sentinel | |
| orbtree_base (const NVFunc &f_, const Compare &c_) | |
| orbtree_base (NVFunc &&f_, const Compare &c_) | |
| template<class T > | |
| orbtree_base (const T &t, const Compare &c_) | |
| std::pair< NodeHandle, bool > | insert (ValueType &&kv) |
| Insert new element. More... | |
| std::pair< NodeHandle, bool > | insert (const ValueType &kv) |
| Insert new element. More... | |
| NodeHandle | insert (NodeHandle hint, ValueType &&kv) |
| Insert new element with hint. More... | |
| NodeHandle | insert (NodeHandle hint, const ValueType &kv) |
| Insert new element with hint. More... | |
| template<class... T> | |
| std::pair< NodeHandle, bool > | emplace (T &&... t) |
| Construct new element in place. More... | |
| template<class... T> | |
| NodeHandle | emplace_hint (NodeHandle hint, T &&... t) |
| Construct new element in place with hint. More... | |
| bool | insert_search (const KeyType &k, NodeHandle &n, bool &insert_left) const |
| helper for insert – find the location where to insert More... | |
| bool | insert_search_hint (NodeHandle hint, const KeyType &k, NodeHandle &n, bool &insert_left) const |
| helper for insert – find the location where to insert More... | |
| void | insert_helper (NodeHandle n, NodeHandle n1, bool insert_left) |
| helper function to do the real work for insert More... | |
| template<class K > | |
| auto | find (const K &key) const -> NodeHandle |
| find any node with the given key More... | |
| template<class K > | |
| auto | lower_bound (const K &key) const -> NodeHandle |
| find the first node not less than the given key – returns nil if none found | |
| template<class K > | |
| auto | upper_bound (const K &key) const -> NodeHandle |
| find the first node larger than the given key – returns nil if none found | |
| const KeyType & | get_node_key (NodeHandle n) const |
| convenience function to get the key of a node | |
| bool | compare_key_equals (NodeHandle n, const KeyType &k) const |
| helper for erase to compare elements | |
| void | get_node_grvalue (NodeHandle n, NVType *res) const |
| get the value of NVFunc for the given node More... | |
| NodeHandle | first () const |
| get first node (or nil) | |
| NodeHandle | last () const |
| get last node (or nil) | |
| NodeHandle | next (NodeHandle n) const |
| get node after n (or nil) – note: next(nil) == nil | |
| NodeHandle | previous (NodeHandle n) const |
| get node before n (or nil) – note: previous(nil) == last() to make it easier to implement end() iterator | |
| NodeHandle | erase (NodeHandle n) |
| remove the given node – return the next node (i.e. next(n) before deleting n) | |
| Node & | get_left (NodeHandle n) |
| convenience helper to get node object that is the left child of the given node handle | |
| const Node & | get_left (NodeHandle n) const |
| convenience helper to get node object that is the left child of the given node handle | |
| Node & | get_right (NodeHandle n) |
| convenience helper to get node object that is the right child of the given node handle | |
| const Node & | get_right (NodeHandle n) const |
| convenience helper to get node object that is the right child of the given node handle | |
| Node & | get_parent (NodeHandle n) |
| convenience helper to get node object that is the parent of the given node handle | |
| const Node & | get_parent (NodeHandle n) const |
| convenience helper to get node object that is the parent of the given node handle | |
| NodeHandle | get_sibling_handle (NodeHandle n) const |
| convenience helper to get the handle of a node's sibling (i.e. parent's other child) | |
| Node & | get_sibling (NodeHandle n) |
| convenience helper to get the node object of a node's sibling (i.e. parent's other child) | |
| const Node & | get_sibling (NodeHandle n) const |
| convenience helper to get the node object of a node's sibling (i.e. parent's other child) | |
| bool | is_left_side (NodeHandle n) const |
| check which side child is n (i.e. returns true if n is the left child of its parent) – requires that n != root | |
| void | update_sum (NodeHandle n) |
| update the sum only inside n | |
| void | update_sum_r (NodeHandle n) |
| update the sum recursively up the tree | |
| template<class KeyValue_ = KeyValue> | |
| void | update_value (NodeHandle n, typename KeyValue_::MappedType const &v) |
| update value in a node – only if this is a map; update sum recursively based on it as well | |
| template<class KeyValue_ = KeyValue> | |
| void | update_value (NodeHandle n, typename KeyValue_::MappedType &&v) |
| update value in a node – only if this is a map; update sum recursively based on it as well | |
| void | rotate_left (NodeHandle x) |
| left rotate More... | |
| void | rotate_right (NodeHandle x) |
| right rotate More... | |
| void | rotate_parent (NodeHandle x) |
| rotate by parent of x (x takes parent's place), this calls either rotate_left() or rotate_right() with the parent of x | |
| void | check_tree_r (double epsilon, NodeHandle x, size_t black_count, size_t &previous_black_count) const |
| recursive helper for check_tree(double) | |
 Protected Member Functions inherited from orbtree::NVFunc_wrapper< NVFunc > Protected Member Functions inherited from orbtree::NVFunc_wrapper< NVFunc > | |
| NVFunc_wrapper (const NVFunc &f_) | |
| NVFunc_wrapper (NVFunc &&f_) | |
| template<class T > | |
| NVFunc_wrapper (const T &t) | |
Protected Attributes | |
| size_t | size1 |
| keep track of the number of inserted elements | |
| NVFunc & | f |
| Compare | c |
| Protected Attributes inherited from orbtree::NVFunc_wrapper< NVFunc > | |
| NVFunc | f |
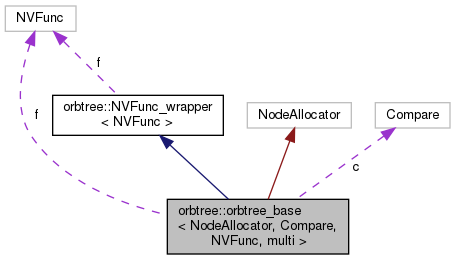
Detailed Description
template<class NodeAllocator, class Compare, class NVFunc, bool multi>
class orbtree::orbtree_base< NodeAllocator, Compare, NVFunc, multi >
base class for both map and set – should not be used directly
- Template Parameters
-
NodeAllocator Class taking care of allocating and freeing nodes, should be NodeAllocatorPtr or NodeAllocatorCompact from orbtree_node.h Compare Comparison functor NVFunc Function that calculates each node's "value" – it is assumed to be a vector-valued function, so these values are stored and manipulated in arrays. It should have a function get_nr() that return the number of values to use. See NVFunc_Adapter_Simple and NVFunc_Adapter_Vec for examples. multi Whether multiple nodes with the same key are allowed.
Member Function Documentation
◆ check_tree()
| void orbtree::orbtree_base< NodeAllocator, Compare, NVFunc, multi >::check_tree | ( | double | epsilon = -1.0 | ) | const |
check that the tree is valid
Checks that binary tree and red-black tree properties are OK, throws exception on error. Also checks that rank function values (partial sums) are consistent as well if epsilon >= 0 (epsilon is the tolerance for rounding errors if NVType is not integral)
◆ emplace()
|
protected |
Construct new element in place.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
◆ emplace_hint()
|
protected |
Construct new element in place with hint.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
Caller suggests a position which is before the element pointed to by the supplied iterator.
For non-multi tree (map/set; i.e. duplicates are not allowed):
- if the hint points to the correct position (i.e. the new element should go before the element referenced by the hint iterator), then a search is not performed, so the insertion cost is amortized constant
- in all other cases, the hint is ignored
For multi tree (duplicate keys are allowed):
- if the key is equal to the key of element referenced by the hint iterator, then the new element is inserted before it
- otherwise, the new element is inserted as close as possible
◆ find()
|
protected |
find any node with the given key
K should be comparable to KeyType
returns nil if not found (to make it easier with iterators)
◆ get_node_grvalue()
|
inlineprotected |
get the value of NVFunc for the given node
should not be called with nil, root or Invalid
note that rank function can depend on a node's value as well; care need to be taken to update rank if a node's value changes!
◆ insert() [1/4]
|
protected |
Insert new element.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
◆ insert() [2/4]
|
protected |
Insert new element.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
◆ insert() [3/4]
|
protected |
Insert new element with hint.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
Caller suggests a position which is before the element pointed to by the supplied iterator.
For non-multi tree (map/set; i.e. duplicates are not allowed):
- if the hint points to the correct position (i.e. the new element should go before the element referenced by the hint iterator), then a search is not performed, so the insertion cost is amortized constant
- in all other cases, the hint is ignored
For multi tree (duplicate keys are allowed):
- if the key is equal to the key of element referenced by the hint iterator, then the new element is inserted before it
- otherwise, the new element is inserted as close as possible
◆ insert() [4/4]
|
protected |
Insert new element with hint.
Return type is always std::pair<iterator,bool>, where the first element is a handle to the newly inserted node and the second element indicates if insert was successful.
For multi map/set, insert always succeeds, to the second element is always true. In this case, a new element is always inserted after any existing elements with the same key.
For a non-multi map/set, insert fails if an element with the same key already exists. In this case, a handle to the element with the same key is returned along with false in the second element.
Caller suggests a position which is before the element pointed to by the supplied iterator.
For non-multi tree (map/set; i.e. duplicates are not allowed):
- if the hint points to the correct position (i.e. the new element should go before the element referenced by the hint iterator), then a search is not performed, so the insertion cost is amortized constant
- in all other cases, the hint is ignored
For multi tree (duplicate keys are allowed):
- if the key is equal to the key of element referenced by the hint iterator, then the new element is inserted before it
- otherwise, the new element is inserted as close as possible
◆ insert_helper()
|
protected |
helper function to do the real work for insert
insert n1 as the left / right child of n
n1 must already contain the proper key / value, but can be uninitialized otherwise
note: this function does not check for the correct relationship between the keys of n and n1, that is the caller's responsibility
◆ insert_search()
|
protected |
helper for insert – find the location where to insert
note: in a multi map/set, the inserted element will come after any already existing elements with the same key
Return true if insert is possible, false if element already exists and this is a non-multi map/set.
◆ insert_search_hint()
|
protected |
helper for insert – find the location where to insert
note: in a multi map/set, the inserted element will come after any already existing elements with the same key
Return true if insert is possible, false if element already exists and this is a non-multi map/set.
Try to insert as close to hint as possible. Note: if hint is bad, it is ignored.
◆ rotate_left()
|
protected |
left rotate
right child of x takes its place, x becomes its left child left child of x's original right child becomes x's right child
◆ rotate_right()
|
protected |
right rotate
left child of x takes its place, y becomes its right child right child of x's original left child becomes x's left child
The documentation for this class was generated from the following file:
